硬件介绍¶
简介¶
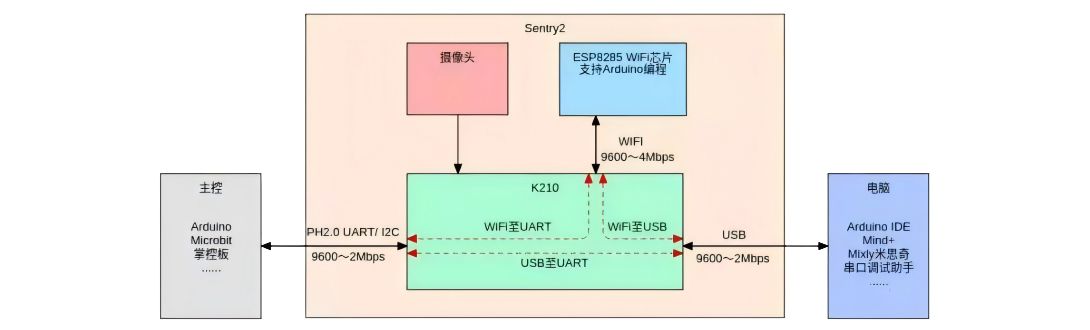
Sentry2视觉传感器采用先进的64位RISC-V神经网络处理器K210开发设计,集成多种先进的离线视觉处理算法,可以满足基本的视觉处理需求。 板载ESP8285-WiFi芯片,可以直接通过Arduino进行编程开发,实现云端图像识别,无线图传,AIoT物联网等应用。ESP8285可以作为K210的协处理器,无需外接主控也可进行AI编程的学习。
目前有2个版本:企业版(标识E)、消费版(标识C)。两个版本在硬件配置和算法上有所不同,以下文档若无特殊说明,按企业版进行介绍,开机后查看屏幕右下角标识进行区分。
应用领域:智能机器人、智能小车、创意设计、STEAM教育、创客比赛、智能玩具、AIoT物联网、学校课题设计

LED灯:通过灯光不同的颜色可以反映出不同的识别结果,当设置为白光常亮时可以当作补光灯使用
摄像头:实时的采集图像数据,Sentry2提供了摄像头设置功能,可以调节图像缩放、白平衡、亮度、饱和度等参数,满足高阶玩家需求
WiFi天线:传感器板载ESP8285芯片,具有WiFi无线通信功能,可以实现云端图像识别,无线图传,AIoT物联网应用等功能
K210处理器:带有神经网络处理单元,双核64位RISC-V处理器,在MCU级别处理其中具有十分优秀的图像处理能力
SD卡座:支持Micro-SD(TF)卡,用于保存图片使用,(注意:有些SD卡并不支持,仅支持SPI通讯方式,不支持SDIO功能)
USB:板载USB-UART芯片,可以直接与电脑通信与控制,同时作为固件更新接口,(注意:USB供电会通过通讯接口对外输出,二者不可同时供电)
LCD屏幕:高清广视角的TFT-ISP彩色屏幕,带来小巧而优秀的图像显示效果,方便于算法调试
摇杆按键:可实现“上下左右中”的5个方向的控制,提供简单实用的UI交互
复位按键:可实现硬件复位,特殊情况下使用
通讯接口:图像处理数据与主控的交互接口,支持UART和I2C方式,可以在UI界面里设置
硬件参数¶
项目 |
单位 |
企业版(标识E) |
消费版(标识C) |
备注 |
|---|---|---|---|---|
工作电压 |
V |
3.3~5.0 |
3.3~5.0 |
通讯口与USB不可同时供电 |
工作电流 |
mA |
190 |
150 |
5V供电,开启人脸算法时的典型值 |
尺寸 |
mm |
40×32×12 |
40x32x12.5 |
不带外壳 |
重量 |
g |
15 |
15 |
不带外壳 |
定位孔间距 |
mm |
32 |
32 |
|
定位孔直径 |
mm |
3 |
3 |
|
摄像头类型 |
NA |
CMOS |
CMOS |
|
摄像头分辨率 |
像素 |
500W |
200W |
|
摄像头帧率 |
fps |
50 |
25 |
|
镜头视场角 |
度° |
70 |
68 |
|
屏幕类型 |
NA |
TFT-ISP高清屏 |
TFT-ISP高清屏 |
|
屏幕尺寸 |
英寸 |
1.3 |
1.3 |
|
屏幕分辨率 |
像素 |
240×240 |
240x240 |
注意
Sentry2运行界面中右下角字母标识 E:企业版,C:消费版
算法列表¶
算法详细介绍可参阅: 算法介绍 章节
算法ID |
名称 |
英文名称 |
企业版E |
消费版C |
简介 |
|---|---|---|---|---|---|
1 |
Color |
支持 |
支持 |
最高可设置25个识别区域,返回每个区域中的颜色信息,如R,G,B值及分类标签 |
|
2 |
Blob |
支持 |
支持 |
检测图像中是否有指定的色块,支持黑、白、红、绿、蓝、黄6种色块同时检测 |
|
3 |
Apriltag |
支持 |
支持 |
支持16H5,25H9,36H11编码的Apriltag标签,可以同时识别最多25个图案 |
|
4 |
Line |
支持 |
支持 |
检测图像中的线条,返回两个端点坐标及倾斜角度,可支持1~5个线段检测 |
|
5 |
Learning |
支持(25个数据) |
支持(15个数据) |
对任意物体进行离线训练并进行识别,可存储25个模型数据 |
|
6 |
Card |
支持(交通、形状、数字) |
支持(仅交通) |
识别特制的卡片图案,包含10张交通卡片,9张形状卡片,10张数字卡片 |
|
7 |
Face |
支持(25个数据) |
支持(15个数据) |
检测与识别人脸,支持口罩检测,可存储25个模型数据 |
|
8 |
20Class |
支持 |
支持 |
识别常见的20类物体,如猫、汽车等 |
|
9 |
QrCode |
支持 |
无 |
检测与识别简单的二维码 |
|
10 |
Custom |
支持 |
支持 |
支持用户自定义算法,运行在板载ESP8285-WiFi芯片内,如云端识图 |
|
11 |
Motion |
支持 |
无 |
判断图像中是否有移动区域 |
开发平台与驱动库¶
开发平台 |
编程语言 |
主控设备 |
驱动库链接 |
企业版 |
消费版 |
|---|---|---|---|---|---|
C/C++ |
Arduino |
支持 |
支持 |
||
图形化 |
Micro:bit |
支持 |
支持 |
||
图形化,C/C++,MicroPython |
Arduino、Micro:bit、掌控板 |
支持 |
支持 |
||
图形化 |
Arduino |
支持 |
支持 |
||
MicroPython |
Micro:bit、掌控板 |
支持 |
支持 |
||
ARM PC |
C/C++ |
树莓派,Linux |
支持 |
支持 |
使用说明¶
Sentry2视觉传感器可以通过通讯接口与主控制器相连接,也可以通过USB与电脑连接。通讯接口可以在UI界面中配置为UART串口或I2C模式,还可以修改设备地址和波特率等参数。
点击观看视频:“Sentry2视觉传感器-Arduino使用指导”
驱动库、固件、资料手册、第三方资源等可参阅: 资源下载 章节
警告
USB与通讯接口不可以同时供电!!!
连接主控¶
接口定义¶

引脚序号 |
UART模式 |
I2C模式 |
备注 |
|---|---|---|---|
1 |
RX |
SDA |
|
2 |
TX |
SCL |
|
3 |
GND |
GND |
|
4 |
VCC |
VCC |
注意!!!当插入USB时,此端口可以对外部设备进行供电,此端口不可直接连接电池,当插入USB时不可接入3.3V系统,需要断开供电引脚 |
接线方式¶
以Arduino UNO举例说明
I2C模式

软串口模式

注意:软串口模式下,Arduino的TX和RX引脚可以自由定义,但需要与程序中的定义保持一致,本例中RX信号为引脚10,TX信号为引脚11

注意:软串口模式下,波特率一般不高于57600,较低的波特率,稳定性较好
UART模式

注意:UART模式下,视觉传感器的RX需要接Arduino的TX,传感器的TX接Arduino的RX
注意:如果使用软串口,可以指定其他的IO口,详见Arduino中的SoftSerialExample
注意:由于Arduino的RX和TX与烧录固件共用端口,因此在烧录程序时,需要断开RX,TX接线,推荐使用I2C或软串口模式
UI界面¶
Sentry2视觉传感器具有2种UI界面:运行界面、设置界面

运行界面
算法状态:此区域用于显示当前正在运行的算法
图像区域:显示摄像头的图像
显示元素:对被测物体进行标识,包括检测框、坐标、信息
系统状态:显示当前帧率和当前图像缩放变焦值
设置界面
菜单选项:上下拨动摇杆来选择不同的菜单,垂直短按摇杆可以进入相应的设置页面
版本信息:此处可以查看固件版本号和固件发布日期
简介说明:对当前菜单进行介绍说明
控件按钮:各种交互按键,用于进行设置操作,不同菜单下的控件是不同的,当导航键移动到某个控件上时会进行高亮显示或蓝边显示
操作提示:当摇杆悬停到不同的控件上时,会显示相应的介绍信息或操作说明,相当于说明书的作用
UI设置界面¶

运行界面往右拨动摇杆可以进入UI设置界面,UI设置共有三个页面:算法设置、摄像头设置、硬件设置
依次往左拨动摇杆则会逐次退出页面,直至返回运行界面
算法设置:可以开启或关闭算法,配置算法参数
摄像头设置:用于调整摄像头的参数,可以对图像进行缩放、白平衡、饱和度、亮度、对比度等参数进行精细调节,需要具备一定的摄像头调参基础,适用于高阶玩家
硬件设置:用于配置通讯方式、波特率、设备地址、灯光颜色、语言等参数,以适配不同的使用模式
硬件设置¶
摇杆按键功能定义¶
上电开机后便可以通过摇杆对视觉传感器进行操作,传感器采用5向导航摇杆,操作定义如下表所示:
当前模式 |
操作方式 |
动作含义 |
|---|---|---|
运行模式 |
向上拨动 |
切换上个算法 |
运行模式 |
向下拨动 |
切换下个算法 |
运行模式 |
向左拨动 |
拍照(当插入SD时) |
运行模式 |
向右拨动 |
进入GUI设置模式 |
运行模式 |
垂直短按 |
保存当前模型(部分算法有效) |
运行模式 |
向上长按 |
放大镜头焦距Zoom |
运行模式 |
向下长按 |
缩小镜头焦距Zoom |
运行模式 |
垂直长按 |
删除所有保存的模型(部分算法有效) |
... |
||
设置模式 |
向上拨动 |
切换上一个菜单或控件 |
设置模式 |
向下拨动 |
切换下一个菜单或控件 |
设置模式 |
向左拨动 |
切换上一个设置界面/返回运行模式 |
设置模式 |
向右拨动 |
切换下一个设置界面 |
设置模式 |
垂直短按 |
进入控件进行参数设置 |
... |
||
开机时 |
向上长按10秒 |
重置传感器 |
开机时 |
垂直长按 |
进入K210固件烧录模式 |
开机时 |
向下长按 |
进入ESP8285固件烧录模式 |
提示:拨动即为短按,长按需要至少为2秒以上的保持时间后再松开
设置通讯方式¶
用于设置视觉传感器与主控的通讯方式,设置后会自动保存,下次开机后不必再次设置,但当通讯异常时,需要检查这些参数是否被改变,有时固件更新后或调用了某些复位寄存器后会改变这些设置,此时需要重新设置

在运行界面往右拨动3次摇杆,进入硬件设置界面
在“输出模式”选项上,压按摇杆进入设置
选择”UART“或”I2C“模式,一般来说,如果主控的UART端口无法支持高波特率,那么I2C的读取速度会更快,有利于提高图像处理帧率
如果使用“UART模式”,那么还需要选择“标准指令”协议或“简单指令“协议,标准指令需要配合寄存器和驱动库进行开发,而简单指令只需要通过串口发送字符即可
点击”确认“返回到菜单栏
往下拨动摇杆,切换到”设备地址“菜单
查看设备地址,此地址应与主控代码中的保持一致,压按摇杆可以进入设置,地址可设置为”0x60~0x63“, 点击”确认“并返回
如果选择”UART模式“,则还需要往下拨动摇杆,切换到”串口波特率“菜单
压按摇杆进入设置,左右拨动摇杆来设置波特率,支持“9600、19200、38400、57600、115200、921600、1152000、2000000”波特率,较高的波特率将有利于图像识别帧率的提升,不同的主控可支持的最高波特率有所差异,需要查看主控的相关说明,当通讯异常时,可尝试降低波特率,默认为9600
往左拨动3次摇杆,返回至运行界面
设置USB功能¶
Sentry2板载一个USB端口,可以实现与电脑的交互通讯,其波特率可单独设置,数据通信方式基于“标准指令协议”或“简单指令协议”

波特率:支持“9600、19200、38400、57600、115200、921600、1152000、2000000”波特率,当控件位于最左侧时可以关闭usb功能
至UART:开启或关闭USB与UART的数据透传功能,开启后,可以实现USB口与UART口的数据互相传输
提示:如果发送的数据属于“协议格式”中的指令,则会执行相应的指令而不会被转发透传
设置运行界面显示元素¶
进行图像识别时,为了便于观察检测结果,需要对识别结果进行标识,Sentry2定义了3种标识元素:识别框、坐标、信息

识别框:显示被测物体的轮廓范围,为一个矩形的方框,其大小为物体的宽和高,位置由物体的中心坐标来确定
坐标:在图像中绘制出被测物体的水平和垂直坐标线,并显示其数值,X:水平位置,Y:垂直位置,W:物体宽度,H:物体高度
信息:显示物体的分类标签、名称内容等信息
提示:当进行多结果检测时,绘制太多的元素可能会降低图像检测帧率,可适当关闭部分元素绘制功能
提示:有些算法并不具备所有的绘制元素,比如“线条检测”不会绘制坐标线
提示:当图像中没有显示任何检测结果时,可能是显示功能全部被关闭了,需要打开相关的功能即可
设置LED灯光颜色¶
进行图像识别时,可以通过传感器前面的LED灯光来指示检测结果,每检测一帧图像,会闪烁一次灯光,灯光颜色和亮度可以进行自定义设置

用户可以分别设置“检测到”物体时的灯光颜色和“未检测到”时的灯光颜色,每按一次控件,将会改变一个颜色,切换顺序如下:

其中,黑色代表关闭灯光
当“检测到”和“未检测到”颜色相同时,LED灯光将保持常亮,不再闪烁
亮度调节范围为0~15,其中0为关闭灯光,15为最亮,如果只作为一般性指示功能,亮度设为1或2即可
- 关闭灯光
在某些情况下,灯光可能会对图像识别产生干扰(如颜色类算法,近距离物体识别时,等),此时需要关闭灯光,有两种方式可以关闭的灯光:
将“检测到”和“未检测到”设置为黑色
将亮度设置为0
- 补光灯功能
当环境较暗时,或者处于逆光环境情况下,需要开启补光灯来照明,可以按照下面的方式设置:
将“检测到”和“未检测到”都设为白色,此时LED灯光将保持白色常亮状态,不再闪烁
将亮度提高,比如设为最大15,此时发光最亮
设置WiFi功能¶
Sentry2板载ESP8285-WiFi芯片,与K210主芯片之间通过UART实现数据通信,当开启“自定义算法”时,会启用ESP8285芯片,启用后功耗会有所增加

波特率:支持“9600、74880、115200、921600、1152000、2000000、3000000、4000000”波特率,当控件位于最左侧时可以关闭wifi功能
至UART:开启或关闭WiFi芯片与UART端口的数据透传功能,开启后,可以实现WiFi芯片与UART口的数据互相传输,可以用于WiFi芯片与主控的数据通信
至USB:开启或关闭WiFi芯片与USB端口的数据透传功能,开启后,可以实现WiFi芯片与USB口的数据互相传输,可以用于WiFi芯片调试日志输出
提示:如果发送的数据属于“协议格式”中的指令,则会执行相应的指令而不会被转发透传
设置坐标系¶
Sentry2支持2种坐标系:绝对值坐标系、百分比坐标系

绝对值坐标系:返回图像中的实际坐标数据,与图像分辨率一致,水平方向范围“0~319”,垂直方向范围“0~239”,图像中心点坐标为(160,120),该模式具有更高的精确度。
百分比坐标系:将实际检测到的坐标结果量化至整幅图像“0~100”的范围区间内,返回其相对值坐标,水平X方向和垂直Y方向范围“0~100”,图像中心点坐标为(50,50)
设置系统语言¶
Sentry2支持2种系统语言:英语、简体中文。当系统语言发生变化时,可以通过该选项进行切换,设置后需要重启设备以完全生效

提示:选择简体中文时,并非所有文本都以汉字显示,例如所训练的人脸模型名称、深度学习训练的模型名称、二维码识别的字符等,暂时不支持中文显示
设置寄存器¶
可以设置Sentry内部寄存器的一些操作:自动保存,保存当前值,恢复默认值

自动保存:开启后,当某些寄存器发生改变时会自动存储至Flash里,如算法参数、镜头参数等,关机后下次开机依然有效。关闭后,改变的值不会自动保存在Flash里,下次开机后自动复位,默认为关闭状态。
保存当前值:可以手动保存当前的所有寄存器的设置参数。该方法可以设置算法开机自启动,在算法开启状态下,当点击 “ 硬件设置 > 寄存器 > 保存当前值 ” 时,即可记 录当前已经开启的算法,在下次设备重启后会⾃动运⾏该算法。如果要关闭⾃启动功能,则先关闭所有算法,然后再执⾏ “ 保存当前值 ” 即可
恢复默认值:恢复寄存器为出厂状态。先点击此按键,再点击“确认”后才生效
摄像头设置¶
数码变焦¶
当需要看清远处的物体时,可以对图像进行放大或缩小,支持1~5档调节
增大缩放值会让物体放大,但视野会变小,看到的东西会变少
减小缩放值会让物体缩小,但视野会变大,可以看到更多的东西
除了UI控件可以设置缩放值外,还支持导航快捷键来设置
向上长按:放大
向下长按:缩小
白平衡¶
在不同光照下(白光和黄光),白色会有一定的偏差,从而导致其他颜色的正常显示,此时需要设置白平衡来进行调节,一共有4种模式:自动、锁定、白光、黄光
自动:此为默认模式,适合于通用场景,大部分应用均可满足需求
锁定:当图像中存在大面积单色背景时,比如近距离识别颜色时,会导致图像发生偏色问题,将导致颜色识别出错,因此在识别之前需要进行白平衡的锁定,避免颜色自动调节,方法如下:
在相同的灯光环境下,将摄像头面向白纸,保持约20cm的距离;
进入“白平衡”设置页面,选择“锁定”模式;
点击“确认”,此时摄像头会进行约2秒的采样,然后记录下当前参数值,不再自动调整;
返回运行界面
注意:锁定模式采样时画面颜色异常,反而可能造成锁定后颜色失真
注意:如果设置为锁定模式,当设备重启后或重新调用锁定模式时,都会重新进行白平衡采样,应确保摄像头面对白色区域或面向色彩丰富的空间,而不应该面向大面积单色物体造成颜色采样失真
提示:如果效果仍不理想,可以使用白平衡校准功能进行手动设置
白光:白色灯光环境下使用
黄光:黄色灯光环境下使用
白平衡校准:
白平衡校准功能可以分别调整R红,G绿,B蓝色通道的色彩增益,从而精确的调整画面为正常的白色。使用该功能,需要首先设置为“锁定”模式,然后才能进行校准功能。
校准后只要不退出“锁定”模式,RGB参数将保持不变,即便设备重启也仍有效,开机时不再必须面向白色区域
具体方法如下图所示:

注意:白平衡校准,一般来说只适合于当前的灯光环境,当场景变换时,可能需要重新校准
提示:RGB数值偏小,则画面亮度偏暗,反之画面偏亮,但如果太大,则画面会过曝
饱和度¶
增大饱和度会让色彩变得鲜艳,色彩会被强化与突出,进行颜色检测和识别时,可以适当增大饱和度
减小饱和度会让色彩变得黯淡,很低时则类似于黑白画面
亮度¶
图像过暗时可以适当提高亮度,但如果在较亮的环境下提高,则图像会变得灰白,如蒙了一层雾气一般
当面对电脑屏幕等光源时,可以适当减小亮度
对比度¶
增大对比度会让相邻有色差的地方区分度更高,当进行黑白线条或二维码图案识别时,可以适当提高对比度
减小对比度会让图像看起来黯淡
锐化¶
增大锐化会让边缘轮廓更清晰,细节更明显,但过高会产生噪点
减小锐化图像会变得模糊
注意:仅企业版的镜头支持该功能
曝光¶
光线较强导致图像曝光时可以减小曝光值
反之如果环境较暗则可以增大曝光值
图像旋转¶
开启后图像将旋转180度
开启算法¶
有多种方式可以开启/关闭算法:UI界面方式,导航键方式,指令方式
通过UI界面开启算法¶

进入“算法设置”页面,在左侧菜单栏选择要运行的算法,点击进入
有些算法具有参数配置功能,可以点击“参数设置”控件进入详情页,对该算法进行参数调整,当导航悬停在某个控件上时,UI界面下方的滚动条会显示操作提示,设置结束后,点击“确认”或“对勾”返回
如果右侧控件区域左下方显示”红色停止”按钮,则代表该算法目前为关闭状态,点击后变为“绿色运行“按钮,则代表开启算法,再次点击又会变为”红色停止“
注意:有些算法参数配置后下次启动算法时才生效
通过导航键开启算法¶

通过上下拨动导航键可以快速的切换算法,每次切换算法后,都会关闭之前的算法
算法切换顺序按照算法ID排序
通过指令开启算法¶
该方式需要由主控设备读写寄存器来实现算法的开启或关闭,我们在多个编程平台提供了封装好的驱动库给用户使用
串口模式需要依照“标准指令协议”或“简单指令协议”来读写控制,详见相关章节介绍
I2C模式可直接读写寄存器
算法开启流程如下:
向寄存器 0x20-VISION_ID 写入要开启的算法ID号
向寄存器 0x21-VISIO_CONF1 中写入0x01,即可开启算法,写入0x00则关闭算法
详细设置,请查询寄存器列表
检测结果¶
通过屏幕查看检测结果¶
当图像检测到目标物体后,会在屏幕中进行标识,各标识含义如下所示

通过指令读取检测结果¶
该方式需要由主控设备读写寄存器来读取结果,我们在多个编程平台提供了封装好的驱动库给用户使用
串口模式需要依照“标准指令协议”或“简单指令协议”来读写控制,详见相关章节介绍
I2C模式可直接读写寄存器
识别结果读取流程如下:
向寄存器 0x20-VISION_ID 写入要读取的算法ID号
读取寄存器 0x34-RESULT_NUM 的值来获取当前检测到了几个目标物体,例如,返回2,则表明检测到了2个物体
向寄存器 0x24-RESULT_ID 写入待读取的结果编号,例如,写入1代表读取第1组结果,写入2代表读取第2个组果
读取寄存器 0x80~0x89 的值来获取检测结果
地址
名称
含义
0x80
RESULT_DATA1_H8
检测结果1,高8位
0x81
RESULT_DATA1_L8
检测结果1,低8位
0x82
RESULT_DATA2_H8
检测结果2,高8位
0x83
RESULT_DATA2_L8
检测结果2,低8位
0x84
RESULT_DATA3_H8
检测结果3,高8位
0x85
RESULT_DATA3_L8
检测结果3,低8位
0x86
RESULT_DATA4_H8
检测结果4,高8位
0x87
RESULT_DATA4_L8
检测结果4,低8位
0x88
RESULT_DATA5_H8
检测结果5,高8位
0x89
RESULT_DATA5_L8
检测结果5,低8位
详细设置,请查询寄存器列表
通讯协议¶
详见 通讯协议 章节
寄存器¶
请联系我们